Caltech Robotics
Mechanical
Designing, testing, and manufacturing vehicles and robotics subsystems.
Electrical
Creating the neurons necessary for control and data collection.
Programming
Creating the brain necessary for autonomous navigation and task completion.
Business
Funding the project, setting up events, and improving the learning experience for the rest of the team.
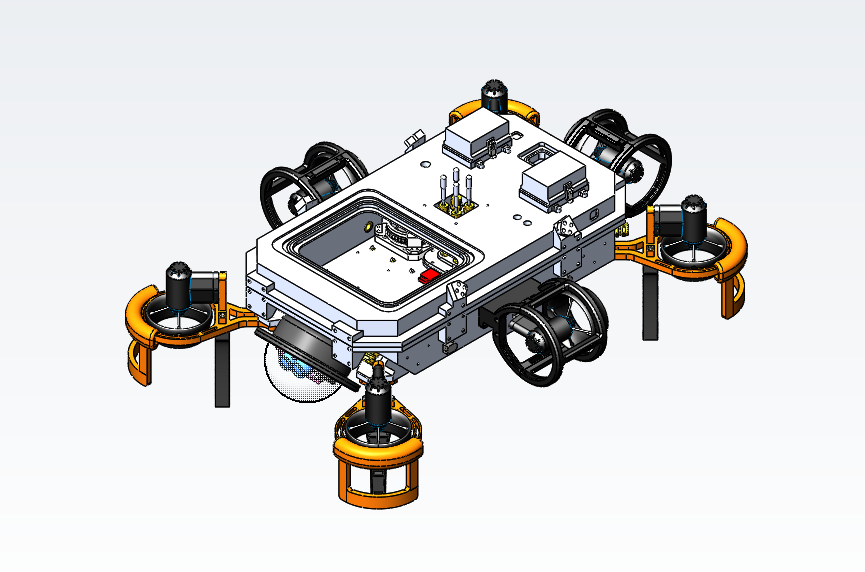
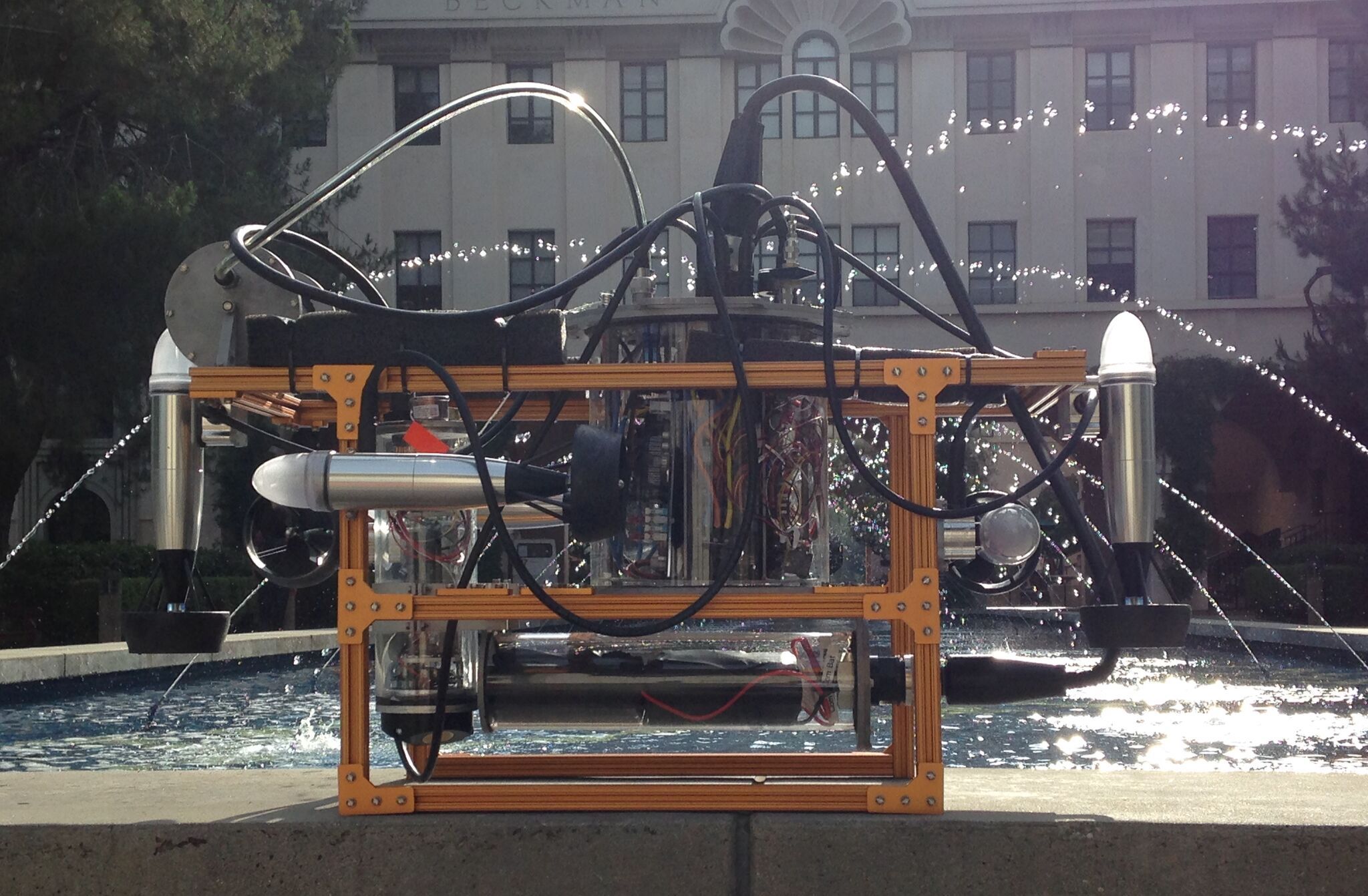
Our Builds
Autonomous underwater vehicles